|
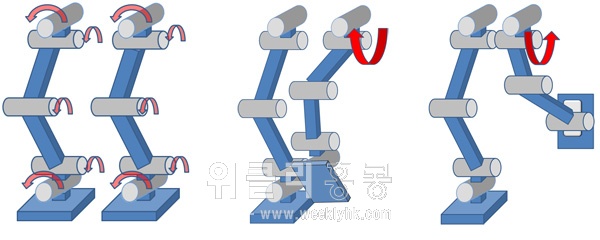
보행 기본 구조 로봇에서의 3축 직교좌표
(로봇의 움직임을 표현한다.) |
위의 그림을 보면 이해가 쉽지는 않을 것이다. 그러면 이 구조에 대해 이해하기 쉽게 알아보도록 한다.
3축 직교좌표는 로봇의 움직임을 좌표속에서 표현하는 도구이다.
X, Y, Z 3차원 공간을 향해 직선방향으로 로봇이 움직이거나 X, Y, Z축을 중심축으로 그 축의 회전하는 방향(Roll, Pitch, Yaw)을 통해 로봇의 관절 움직임을 표현할 수 있는 것이다.
그 직교좌표를 바탕으로 휴머노이드 하반부 보행 기본 구조를 표현한 것이다.
따라서 보행 기본구조를 3축 직교좌표에 대입해서 이해하면 로봇이 어떻게 움직이는지 확인할 수 있다.
특히 'Roll, Yaw, Pitch'라는 조금 생소한 단어가 로봇관절에 어떻게 적용되었는지 유의해서 봐야 한다. 이부분에 있어서 목운동으로 이 모든것을 설명해 보도록 하겠다.
3차원 직교좌표 설명
사람의 목 운동과 비교하면 이해가 쉽다.
고개를 좌우로 갸웃거리는것은 Roll
고개를 상하로 끄덕이는 것은 Pitch
고개를 절레절레 흔드는것은 Yaw
 |
| 고개를 좌우로 갸우뚱 고개를 상하로 끄덕 고개를 절레절레 흔듬 |
보행구조 설명
이제 어떻게 로봇이 움직이는지 다양한 동작 예를 통해 알아보았다. 여러분이 직접 관절이 움직이는 장난감, 프라모델 등으로 한 번 다양한 동작 표현을 해보면, 더욱 더 도움이 될 것이다.
각 동작이 움직일 때마다 어떤 관절(Roll, Pitch, Yaw)들이 움직이는지도 확인해 보도록 하자.
 |
| 기본자세 다리 앞으로 들기 다리 뒤로 들기 |
 |
| 발목 꺽기 다리 벌리기 다리 수평으로 굽히기 |
<로보링크 이현종 이사
www.robolink.co.kr>
ⓒ 위클리 홍콩(http://www.weeklyhk.com), 무단전재 및 재배포 금지
ⓒ위클리홍콩의 모든 콘텐츠(기사 등)는 저작권법의 보호를 받은바, 무단 전재, 복사, 배포 등을 금합니다.
 [모닝 하이라이트] 2024년 05월 18일 (토)
▣ 정부, 극한의 날씨에 재미를 위해 무모하게 등산하거나 해변을 찾는 이들에게 HK$2,000 별금 및 14일 징역형 부과 예정
▣ 홍콩에서 새로운 COVID-19 변종 KP.2 발견, 여름철 확산 우려
▣ 올해 중반, 침사추이 Granville Road와 Carnarvon Road에 두 번째 대각선 횡단보도 설치 예정
▣ 이민국 본부, 6월 11일 완차이에서 정관오로 이전 예정
▣ 정부, Western Harbour Crossing의 교통 혼잡 완화위해 2025년 추가 차선 공사 계획
▣ 소비자위원회, 출장 청소 서비스 관련 다수 불만 접수. 고객들에게 철저한 작업 검사와 만족 여부 확인 후 청소부를 떠나게 할 것을 권장
▣ 소비자위원회, 시중 판매 중인 아기 옷 절반 이상이 질식과 열상 유발 가능성 경고. 단추 및 끈 디자인이 문제라고 지적
▣ HR 전문가, 2023 예산안에서 급여 인상안이 시장의 실제 상황을 반영하지 못했다고 비판. 노조는 정부에 인상안 시행 촉구
[모닝 하이라이트] 2024년 05월 18일 (토)
▣ 정부, 극한의 날씨에 재미를 위해 무모하게 등산하거나 해변을 찾는 이들에게 HK$2,000 별금 및 14일 징역형 부과 예정
▣ 홍콩에서 새로운 COVID-19 변종 KP.2 발견, 여름철 확산 우려
▣ 올해 중반, 침사추이 Granville Road와 Carnarvon Road에 두 번째 대각선 횡단보도 설치 예정
▣ 이민국 본부, 6월 11일 완차이에서 정관오로 이전 예정
▣ 정부, Western Harbour Crossing의 교통 혼잡 완화위해 2025년 추가 차선 공사 계획
▣ 소비자위원회, 출장 청소 서비스 관련 다수 불만 접수. 고객들에게 철저한 작업 검사와 만족 여부 확인 후 청소부를 떠나게 할 것을 권장
▣ 소비자위원회, 시중 판매 중인 아기 옷 절반 이상이 질식과 열상 유발 가능성 경고. 단추 및 끈 디자인이 문제라고 지적
▣ HR 전문가, 2023 예산안에서 급여 인상안이 시장의 실제 상황을 반영하지 못했다고 비판. 노조는 정부에 인상안 시행 촉구
 장국영의 유작 <이도공간>을 보고 떠오르는 물음들
김수진 ‘코끼리를 생각하지 마시오’라는 말을 들으면 코끼리를 떠올리게 된다. 이렇게 떠올릴 수밖에 없는 것은 우리 뇌가 작동하는 무의식 때문이라고 한다. 은 이와 비슷한 에피소드인 장국영의 강의로 시작된다. 귀신을 보는 장흔의 장면이 나오고, 귀신은 단지 뇌에 저장된 정보일 뿐 “여러분이 귀신을 언급하는 일이 다시...
장국영의 유작 <이도공간>을 보고 떠오르는 물음들
김수진 ‘코끼리를 생각하지 마시오’라는 말을 들으면 코끼리를 떠올리게 된다. 이렇게 떠올릴 수밖에 없는 것은 우리 뇌가 작동하는 무의식 때문이라고 한다. 은 이와 비슷한 에피소드인 장국영의 강의로 시작된다. 귀신을 보는 장흔의 장면이 나오고, 귀신은 단지 뇌에 저장된 정보일 뿐 “여러분이 귀신을 언급하는 일이 다시...
 라이프정글협회 드래곤보트 팀 모집 안내
라이프정글협회 드래곤보트 팀 모집 안내
 [홍콩총영사관] 대한민국 입국 방역정책 정보 (2023. 3. 11. 현재)
[홍콩총영사관] 대한민국 입국 방역정책 정보 (2023. 3. 11. 현재)
 한국통합민원센터, '지인소개 이벤트’ 진행 시작
한국통합민원센터, '지인소개 이벤트’ 진행 시작
 [990호] 2024년 05월 17일
[990호] 2024년 05월 17일

 목록
목록